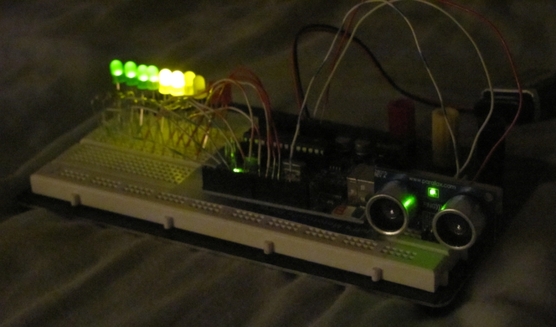
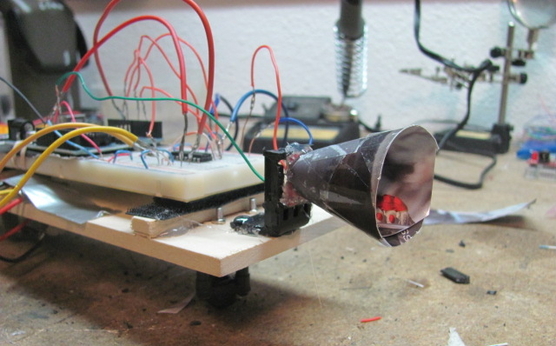
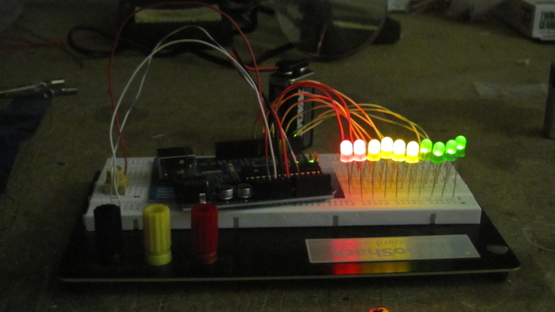
Ardie's new eye getting probed for readings.
Introduction
Howdy All,
I know it's been quite awhile since I updated the blog here. Believe it or not, I've actually been pretty busy. That's why I haven't been able to work on many projects or get much blog content up lately. However, tonight I am going to rectify that with a quick description about some of the testing I am doing for my next upgrade for Ardie.
Basically I want to give Ardie a set of 'sight' sensors to help him avoid obstacles. While that sensor suite could, one day, include a full set of cameras, today is not that day. Today, instead, I am going to be testing some ultrasonic rangefinders for Ardie to use in place of actual eyes. Rangefinders work in the same manner that a bat or a dolphin's echolocation does. They bounce a super-high-pitched sound wave off of nearby objects and then process the reflected wave to determine how far away the object is. The result is returned as a digital step wave
I know it's been quite awhile since I updated the blog here. Believe it or not, I've actually been pretty busy. That's why I haven't been able to work on many projects or get much blog content up lately. However, tonight I am going to rectify that with a quick description about some of the testing I am doing for my next upgrade for Ardie.
Basically I want to give Ardie a set of 'sight' sensors to help him avoid obstacles. While that sensor suite could, one day, include a full set of cameras, today is not that day. Today, instead, I am going to be testing some ultrasonic rangefinders for Ardie to use in place of actual eyes. Rangefinders work in the same manner that a bat or a dolphin's echolocation does. They bounce a super-high-pitched sound wave off of nearby objects and then process the reflected wave to determine how far away the object is. The result is returned as a digital step wave

 RSS Feed
RSS Feed
